/index.php/article/2021/06/176
在工业应用中,最常见的电机就是伺服电机。
常用它来驱动运动轴,实现高精度定位。
比如,常见的物料取放运动平台,传送带,机器人机械手,镜头调焦等。

伺服电机用于物料的取放。

伺服电机用于物料的取放,带光学识别。

伺服电机用于点胶,带光学识别定位。

伺服电机用于包装。

伺服电机用于酒瓶传送带。

伺服电机用于机器人。

伺服电机用于机器人。

伺服电机用于XY运动平台,来自HIWIN。

伺服电机用于单轴运动平台。
 伺服电机用于镜头调焦。
伺服电机用于镜头调焦。
那么什么是伺服电机?常用伺服电机有哪些种类?
01
伺服电机
其实伺服电机是闭环控制系统中的电机,只要它处于闭环系统就可以称为伺服电机。所以“伺服”其实和电机的结构和种类没有关系。
它可以是我们之前说的任何电机。
比如直线电机,同步电机,异步电机,直流电机,音圈电机,压电电机,磁滞电机,甚至步进电机等都可以。

步进电机也可以是伺服电机,来自Applied Motion Products。
这里的重点在于闭环。
什么是闭环系统(伺服系统)?

闭环系统和开环系统示意图,闭环控制系统有反馈装置,用来反馈电机的位置,而开环没有。

闭环系统示意图:两图中电机都是闭环系统,但是上图负载是开环系统,下图负载是闭环系统,因为下图有编码器和玻璃尺作为负载位置反馈。

简化的控制系统示意图,闭环控制系统有反馈,而开环没有。
简言之,闭环系统是一种通过使用反馈装置,将系统的实际性能与其指令性能进行比较,来校正系统误差(位置、速度或扭矩)的系统。
所以,是否是闭环,重点看系统有没有反馈信号,并利用反馈信息调整输入量以控制输出量,使其接近目标值。
这就像开车,我们有一个目的地和最高限速。我们可以通过控制油门或者电门来控制速度,使其在不超过最高限速的同时,最快地到达目的地。

开车通过油门控制速度示意图。
在此过程中,我们知道离目标还有多远,实时速度是多少。在没有达到目的地之前,我们都希望全速前进,但是如果速度超过了最高限制,我们又稍稍释放油门或者电门,来降低速度。
明显地,这里的速度控制就是一个闭环控制。
02
伺服系统
一个典型的伺服系统,包含电机,控制器,驱动器,反馈装置等设备。

典型伺服系统构成:包括伺服控制器,伺服驱动器(放大器),电机,编码器等。
伺服控制器,也称为运动控制器,可以被认为是伺服系统的大脑。运动曲线,例如加速度、速度等都由这里产生。控制器向驱动器发送信号,驱动器使电机执行所需的运动。
控制器还担任闭合系统回路的重要任务,通过不断读取编码器的反馈,并通过驱动器修改传递到电机的信号,来纠正实际值和想要值之间的误差,这些误差包括位置,速度和扭矩等误差。
伺服驱动器放大来自主控制器的信号,为电机提供足够的电流以产生速度和扭矩。在旋转电机中,电流与扭矩成正比,因此伺服驱动器直接控制电机产生的扭矩。同样,在线性电机中,电流与力成正比,因此驱动器控制电机产生的力。
反馈通常由编码器或旋转变压器(可以看着是一种传感器)提供。在需要非常精确定位的应用中,可以使用两个反馈设备,一个在电机上以验证电机的性能,另一个在负载上以验证负载的实际位置。

双环控制常用于线性轴的精确定位,电机上有旋转编码器,线性轴上有线性编码器,来自ABB。
上面谈到,在伺服电机中,需要控制的量包括位置,速度和扭矩或力。
这些量可以通过编码器或者光栅尺,霍尔传感器,LVDT等传感器来提供(其中扭矩需要电流传感器检测),然后由控制器运算并给出控制命令,传达到驱动器,再由驱动器驱动电机,使其按照设定的位移或者速度或者扭矩运行。

一个音圈伺服电机剖视图及其控制回路示意图,剖视图中线性编码器(Linear Scale)担任反馈装置。

伺服回路:电流与旋转电机中的扭矩,或线性电机中的力成正比。电流传感器提供流过电机的电流信号,并将信号发送回控制器,控制器从命令信号中减去该信号并作用于电机。当伺服电机处于指令电流时,循环被满足,直到电流下降到指令电流以下,循环将增加电流直到达到命令电流,整个循环过程速度极快,通常在亚秒级更新。速度环以相同的方式工作,直流电机电压与速度成正比。当速度低于指令速度时,速度环向电流环发送命令以增加电流,从而增加电压。交流电机可以通过编码器和其他传感器反馈速度和位置,并通过速度环和位置环改变电流,实现控制。三个回路以优化的方式同步工作,以提供对伺服机构的平滑和精确控制。

闭环控制示意图:电流环嵌套在速度环中,而速度环又嵌套在位置环中。
所以,一部电机是否可以看着伺服电机,最关键的是看它是否用于闭环系统。
反馈装置可以集成在电机中,也可以和电机分离单独装配在系统中。
其实,对伺服电机的探索起源于1950年,那时美国致力于工厂自动化的升级。
早期的自动化机械和工业机器人使用液压或气动来控制执行器,但它们在准确性,可靠性,管道漏油漏气等方面存在问题。
随着技术的进步,直流伺服电机在 50 年代和 60 年代得到增长,并且开始安装在工业机器人中,以取代麻烦的液压和气动机构。
与此同时,交流伺服电机出现在 80 年代,它们的好处包括使机器人更小更轻,扭矩脉动更小,因此,现代工业机械中使用的大部分伺服电机是交流伺服电机。
03
伺服电机的种类

伺服电机的分类
根据电机的不同分类方法,伺服电机也有不同的类型。
01
直流伺服VS交流伺服电机
根据使用交流电还是直流电驱动,伺服电机可以分为交流伺服电机和直流伺服电机。
从性能的角度来看,交流和直流电机之间的主要区别在于速度控制。
对于直流电机,速度与恒定负载的电源电压成正比,而在交流电机中,速度由施加电压的频率和磁极数决定。
 交流伺服电机示意图,含有旋转编码器。
交流伺服电机示意图,含有旋转编码器。

直流伺服电机工作原理示意图,位置传感器返回位置信息到控制器。
交流伺服电机分为同步电机和异步电机(感应电机),同步电机包含永磁体,为了增加电机输出扭矩或者力,永磁体的使用量增加,因此成本更高,它们被广泛用于低功率应用(一般不超过10kW)。
然而,随着近年来高性能永磁体的出现,同步交流伺服电机现已成为默认选项,实际上,一些最常见的高性能工业伺服电机是三相同步无刷交流电机。
异步电机不使用永磁体,往往用于更高输出的应用,比如10kW 或更高。
虽然交流和直流电机都用于伺服系统,但交流电机能承受更高的电流。
同时,在无刷直流电机(BLDC )电机中,定子线圈呈梯形缠绕并产生梯形反电动势波形,这往往会产生可听噪声,换向分六步实现,这会产生转矩脉动。
另一方面,同步交流电机具有正弦绕组定子并使用连续的正弦换向,从而消除了 BLDC 电机所经历的转矩脉动。
这使得同步交流电机成为高性能工业伺服应用的首选。
例如机器人,在线制造和其他需要高重复性和高精度的工业应用。
02
有刷伺服电机VS无刷伺服电机
而根据电机使用换向器的类型,伺服电机又可以分为有刷伺服电机和无刷伺服电机。
有刷电机通常更便宜,操作更简单,而无刷设计更可靠,效率更高,噪音更小。
有刷直流电机根据定子的结构进一步细分:串联、并联、复合或永磁。
虽然伺服系统中使用的大多数电机都是无刷设计,但有时采用有刷永磁直流电机作为伺服电机,因为它们简单且成本低。
伺服应用中最常见的有刷直流电机类型是永磁直流(PMDC)电机。
无刷直流(BLDC)电机也用于伺服系统。
无刷直流电机用电子方式代替物理电刷和换向器,通常使用霍尔效应传感器或编码器。

无刷直流电机结构及控制信号示意图。
换向器是一种旋转式电气开关,它周期性地反转转子电流方向,以实现连续运转。
它由一个圆柱体组成,该圆柱体由转子上的多个金属接触段组成,与电刷之间沟通电流。电刷由柔软的导电材料(例如碳)制成,通常有两个或多个电触点,在换向器旋转时与换向器滑动接触,实现电流方向的改变和电流导通。

有刷直流电机及换向器(Commutator)结构。

有刷直流电机及换向器结构。

有刷直流电机示意图。
交流电机通常是无刷的,尽管有些设计(例如可以使用交流或直流电源运行的通用电机)确实有电刷并通过机械换向。
无刷交流(BLAC)电机这一术语可能有点混乱,因为它们也被称为永磁交流(PMAC)电机或永磁同步电机(PMSM)。
03
同步伺服电机VS异步伺服电机
最后,根据电机的旋转磁场和转子是否同步,又分为同步电机和异步电机。
虽然直流电机通常被归类为有刷或无刷电机,但交流电机更频繁地根据其旋转磁场的速度进行区分,即同步或异步。
在交流电机中,速度由电源电压的频率和磁极数决定,该速度称为同步速度。
在同步电机中,转子以与定子旋转磁场相同的速度旋转。
在异步电机(通常称为感应电机)中,转子以比定子旋转磁场慢的速度旋转。
当感应电机与变频驱动器配对时,可以实现类似于伺服电机的速度控制和性能,但因为它们通常不包含反馈,所以不是真正的伺服设备。

几种伺服电机的对比,来自MECAPOON。

伺服电机应用,来自MECAPOON。
04
伺服电机的特性
伺服电机能够在很宽的速度范围内运行,包括高速和低速而不会过热,并在零速时保持足够的扭矩以将负载固定到位。
尽管作用在系统上的扭矩量发生了变化,但它们也可以保持恒定的速度。
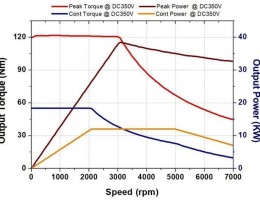
伺服电机也可以进行转矩控制,伺服系统通常由其速度转矩曲线定义,该曲线表示电机的峰值和连续转矩值。

典型伺服电机速度扭矩图。
峰值扭矩是电机在短时间内可以产生的最大扭矩,而连续扭矩可以无限期地产生。
如果伺服电机长时间以高于其连续额定扭矩的方式运行,则会产生过多的热量,这会损坏电机的电路。
在高于其峰值扭矩的情况下运行,伺服电机可能会使磁铁退磁。
声明:图文均来自网络,版权归原作者所有。如认为内容侵权,请联系我们删除。鱼儿游无双の小麦